 みらいぶっくグループ
みらいぶっくグループ
人の役に立つロボットを作りたい! レスキューロボットとしての自律型航空ロボット開発へ
茗溪学園高等学校(茨城県) 科学部物理班

◆部員数6人
(1年生1人、2年生2人、3年生3人)
◆答えてくれた人
内村公紀くん(3年生)
■研究内容 「自律型航空ロボットの研究」
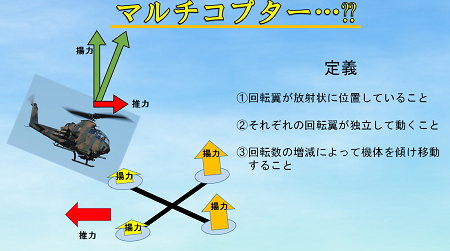
2011年の福島第一原子力発電所の水素爆発事故で、人間が現場に立ち入ることができず情報を得ることができませんでした。テレビで「マルチコプター」を見て興味を持ち、これなら将来レスキューロボットとして活躍するのではないかと考え、研究を始めました。マルチコプターは、水平に3枚以上ある羽がそれぞれが独立して動き、その時に生まれる垂力で移動で移動する航空ロボットです。
基本的には、マルチコプターを製作して、自律的に動けるようプログラムを書き、飛行するかしないかを検証しました。そして、その都度発見した問題点をもとに改良を重ね、カメラを搭載するなどしてレスキューロボットへ改良していきました。
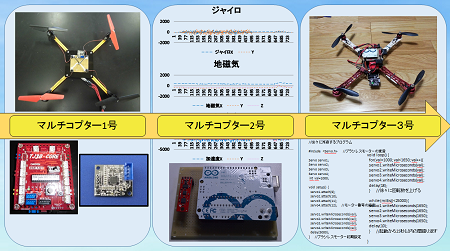
◆マルチコプター1号の製作と実験
市販のカメラ搭載型マルチコプターのモーターとプロペラ駆動部分を利用し、本体基盤はダイセン電子工業のTJ3B、さらに同社のモータードライバー、多機能電子コンパス(ジャイロセンサーとコンパスセンター)を使用。C言語をモデルにしたC−styleと呼ばれるプログラムで飛行させました。これは完全に自律しての飛行は不成功でした。

◆マルチコプター2号の製作と実験
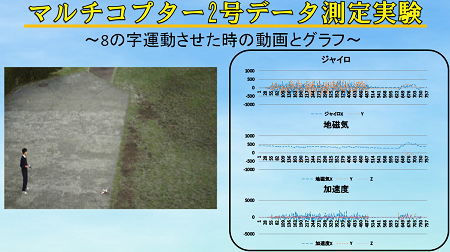
ラジコン型キットを活用して製作しました。ロボットを制御するための基板としてArduino UNOを使い、9degrees of freedom SENというセンサーを用いて飛行の状態を計測しました。9degrees of freedom SENには、ジャイロセンサー(傾きを調べる)、加速度センサー(勢いを調べる)、地磁気センサー(方向を調べる)が備わっているので、センサーの特徴を確認しながら、自律プログラムを書く参考にしていきました。

◆マルチコプター3号の製作と実験
2号をベースに、これまで学んできたことを生かして自律型マルチコプターを製作しました。ラジコン用のアンプ付ブラシレスモーターで制御し、動かすことはできましたが、完全な制御には至らなかったのでこれからも開発を続けたいと思います。また、9degrees of freedom SENの制御も続けたいと思っています。

■研究を始めた理由・経緯は?
僕の学校では、高校2年の時に個人課題研究というものがあり、以前からレスキューロボットに興味があったので、自律型航空ロボットをテーマに選びました。
■今回の研究にかかった時間はどのくらい?
2013年の3月頃から研究を始めました。週3時間弱で1年半かけて行いました。
■今回の研究で苦労したことは?
自律飛行をさせるので、実験で飛ばす際にあやまって自分めがけて飛んでくることもあり(!)、危険で苦労しました。
■「ココは工夫した!」「ココを見てほしい」という点は?
リモコンを使わない完全自律飛行にこだわって研究していることです。
■今回の研究は今後も続けていきますか?
続けます。近年、異常気象による災害や人的災害が多発し、レスキューロボットの分野は発展しつつありますが、マルチコプターの分野は発展途上です。将来マルチコプターは重要な分野になると思うので、高校卒業後も改良を加えて、実用化を目指します。
■ふだんの活動では何をしていますか?
部では科学フェスティバルをはじめとした工作、実験教室の準備をしています。個人では「ロボカップジュニア」と呼ばれる自律型ロボットの大会に参加しています。
■総文祭に参加した感想をきかせてください。
全国の様々な研究をしている高校生に会うことができて良い刺激をうけました。自分の研究を全国大会の場で発表し、質疑や議論をすることができ、とても貴重な経験となりました。


















